加載中
九州空間
6833 (JZ-WL1)
詳細說明
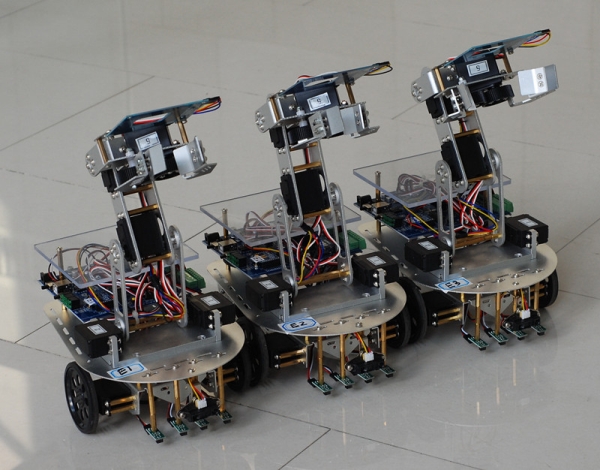
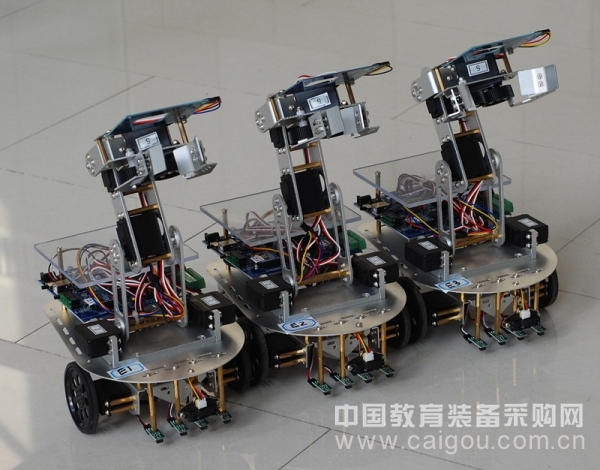
小型物流機器人系統 JZ-WL1
一�����、小型物流機器人系統概述
重要技術點:物聯網���,Zigbee����,RFID����,機械手���,多線程
二���、物流機器人系統技術參數
1.機器人套件技術參數
1)Openduino機器人控制器:
CPU:采用Atmega328p�����;32KB的Flash和512KB的SRAM����;工作頻率16MHz���;
控制器尺寸:長130mm*寬120mm���;
機器人控制器提供開發通訊組網的靜態庫�,云端數據庫可以自主開發和拓展��;
2)移動機械手:
采用四自由度機械手實現物料的自動抓取和姿態控制�;
機械手大臂長為80mm���,小臂長為90mm��,手臂長(含手爪)長為113.7mm��;機器人寬為168.3mm�,總長不大于467.7mm�����,高不大于402mm���;
機械手手爪上方安裝RFID讀卡器�����,讀卡器與機器人控制器之間采用串口通訊��。
3)機器人套件的傳感模塊:
a��、機器人紅外避障傳感器:1個�����,的有效檢測距離為10cm~80cm�����。
b���、循跡傳感器:少安裝4個��,中間兩個循跡傳感器水平間距不能小于20mm����,外側兩個水平間距不能小于70mm�����,與被檢測面距離不大于7mm����。
4)通訊模式:
幾個機器人套件通訊采用Zigbee無線組網��,2.4GHz頻段����,通信速率達250Kbps��,室內傳輸距離達100m�����;
2.貨架單元:
1)每個物流貨架單元有6個存儲位置����,按照2列3層排列���;
2)每個存儲位置長160mm��,寬70mm����,高100mm�����。
3.貼有電子標簽的物料:
1)圓柱形物料的直徑為40mm�,高為45mm�����;
2)頂部貼有RFID標簽卡���,工作頻率為125KHz��,讀卡有效距離為50mm�。
4.倉庫場地:
1)物流倉庫場地設計為白色底���,黑色軌跡�����,長為3000mm�����,寬為1500mm���。
2)適用環境:-40~85℃�。
三���、物流機器人系統主要特點
1. 可根據應用需要選擇機器人數量
2. 控制模塊和通訊模塊完全標準化
3. 機械手靈活控制
4. 可擴展不同的循線傳感器和防撞傳感器
5. 可配置不同網絡結構
四��、物流機器人系統配置表
|
序號
|
名稱
|
型號
|
小配置
|
標準配置
|
描述
|
|
1
|
機器人
|
機器人個體
|
|
1
|
3
|
帶機械手的機器人平臺
|
|
循線傳感器
|
|
4
|
12
|
用來循線
|
|
Zigbee模塊套件
|
JZ-S32409
|
2
|
4
|
協調器和終端
|
|
RFID讀卡器
|
|
1
|
3
|
讀取電子標簽卡
|
|
Sharp紅外測距傳感器
|
|
1
|
3
|
避障
|
|
2
|
倉庫場地
|
|
1
|
1
|
白色底��,黑色軌跡
|
|
3
|
物料
|
|
6
|
18
|
貼有電子標簽
|
|
4
|
貨架單元
|
|
1
|
3
|
6~18個倉位
|